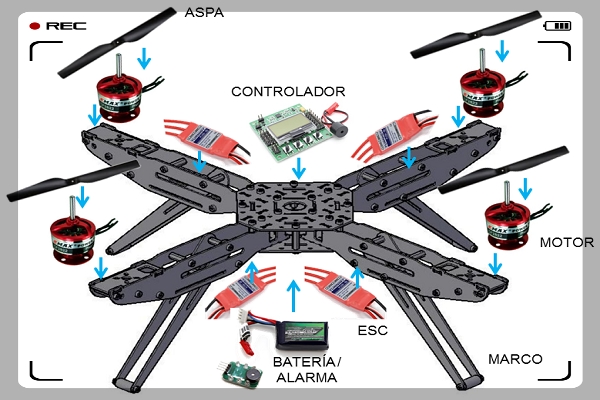

– Marco (o frames): Es el esqueleto del multirotor, es la estructura que le da la forma y en donde todas las otras partes se instalan y aseguran. Como se observa existen diferentes diseños y materiales.
Motores, Hélices y ESCs: Son los componentes fundamentales para mantener al multirotor en el aire. Los ESC (Electronic Speed Control) o Controladores de Velocidad Electrónicos regulan la potencia eléctrica para lograr controlar el giro de los motores con agilidad y eficiencia. Este giro está conectado a las hélices cuya rotación a alta velocidad genera la sustentación del multirotor.
Controlador de Vuelo: Este componente es el cerebro de la máquina. Éste sensa y controla todo lo que sucede con el multirotor, y es a donde prácticamente todos los componentes van conectados.
Radio Receptor: Es el responsable de recibir la señal de radio enviada desde el Control Remoto, el cual ha interpretado el movimiento realizado por el usuario y lo ha transformado en onda radial. La señal de radio es recibida por el Radio Receptor del multirotor y transformada en datos que se envían al Controlador de Vuelo para que ejecute la instrucción, normalmente con cambios coordinados en la velocidad de los motores (cuando se trate de una instrucción de movimiento).
Baterías: Proporcionan la energía necesaria para hacer funcionar el equipo. Son componentes muy pesados por lo que es esencial que sean capaces de tener una buena relación peso/capacidad para maximizar la autonomía de vuelo del mutirotor. Las más utilizadas son las baterías Li-Po (polímero de litio) debido a su densidad de energía, su bajo peso y su alta tasa de descarga que es ideal para maniobras ágiles como las de un multirotor.
Estos fueron los componentes básicos que constituyen multirotor, con esto ya es posible volar, pero existen componentes adicionales para darle mayor estabilidad, seguridad y utilidad al equipo. A continuación algunos ejemplos:
GPS y Bújula: Componentes que conectados al Controlador de Vuelo le permiten a éste conocer la ubicación, altitud y velocidad exactas del multirotor. A partir de esto, y dependiendo del programa que tenga el controlador, se podría automatizar el comportamiento del multirotor para mantenerse estático en un mismo punto, volar en cierta dirección o velocidad relativa o volar hacia puntos predefinidos.
Cámara y Estabilizador: En la estructura del multirotor se puede acoplar una cámara para aprovechar el vuelo y capturar fotos o vídeos desde el aire. Dependiendo del tamaño del multirotor la cámara podrá ser desde una pesada profesional hasta una liviana cámara de acción, como una GoPro Hero o Sony Action Cam. Normalmente se utiliza un estabilizador o Gimbal para evitar que los movimientos propios del vuelo del multirotor afecten las tomas. Estos gimbal absorben la vibración de los motores y corrigen automáticamente la inclinación de la cámara para que siempre esté en el mismo ángulo respecto al suelo. Algunos gimbal también pueden ser conectados al Controlador de Vuelo y a través del control remoto el usuario puede cambiar el ángulo de inclinación de la cámara mientras el multirotor está en el aire.
FPV (First Person View): Consiste en un sistema de transmisión y recepción del vídeo capturado por la cámara, en tiempo real. De esta manera el usuario u otro interesado puede ver lo que el multirotor está “viendo”. Comúnmente consiste en conectar la cámara a un transmisor de vídeo pequeño montado en el drone y un receptor con una pequeña pantalla para que el usuario la pueda cargar y ver mientras acciona el control remoto. Es de muchísima utilidad para lograr vuelos de gran altura o distancia de forma segura, y para capturar las mejores tomas durante un vuelo.


Comentarios recientes